一,相關產業
防災救災,營建土木,下水道工程CCTV
二,相關零件
- 控制器系列
- Propeller Platform USB 開發板
- Arduino 控制器
- Arduino Uno Rev3
- 運動控制系列
- Qik 2s12v10 雙軸串列馬達驅動器
- MD03 高功率H-Bridge馬達驅動器
- 感測器系列
- Memsic 2125雙軸加速度計(PWM輸出)
- CHR-UM6 方向感測器
- 通訊模組系列
- 人機介面系列
三,簡述
這是由飆機器人自行開發與設計的,適合用在管壁探勘、下水道攝影、清潔、風管、救災等。
它具有以下幾種特色:
- 可測量行走距離
- 具央視高解析度可旋轉攝影機
- 可檢視與記錄影像
- 可爬坡
- 可偵測管壁內不同氣體
- 管壁裂縫自動檢測
- 車身防水
- 可增加夾爪
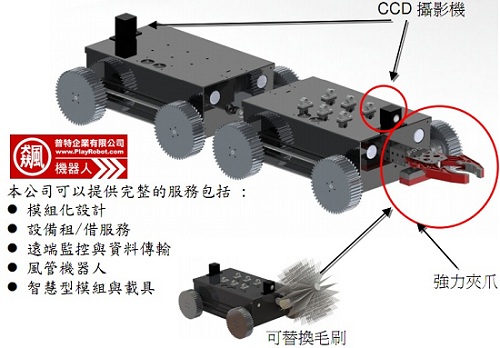
四,功能簡介
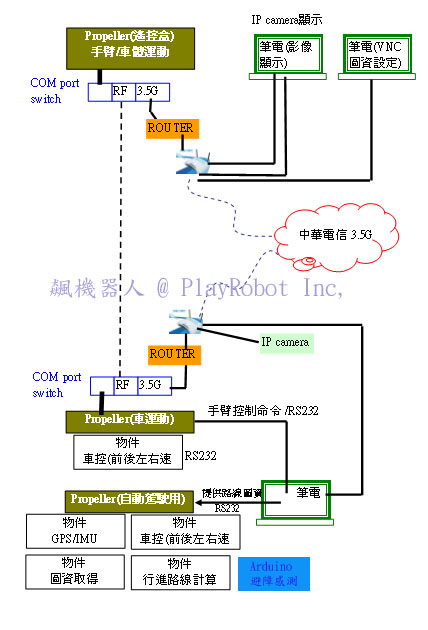
利用Propeller八核心控制器,可以同時計算輪胎行進距離、車申傾斜角度、管內的溫度與濕度、控制外掛清掃機具以及提供遠端即時控制。影像方面可提供前方30萬畫素高解析度CCD攝影機搭配旋轉支架、具有高亮度照明設備、具有管壁裂縫自動偵測檢查功能。全系列功能全部由本公司設計與製造,具有客製化功能改造的能力。
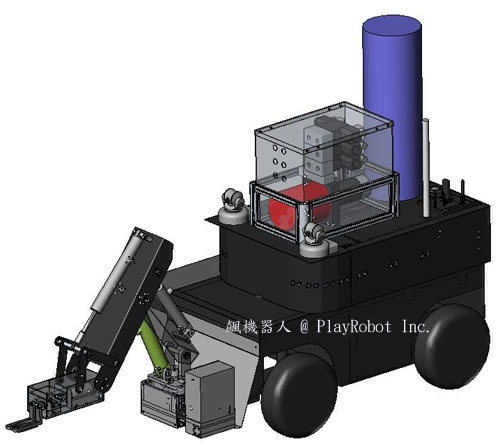
外觀示意圖
影片介紹