【Arduino IoT Certified Engineer是甚麼?】
關於Arduino IoT Certified Engineer這張證照,甫一推出就收到許多回響,也有許多人好奇:這張證照到底是甚麼呢?很好奇相關的內容!
在此提供您IoT Certified Engineer證照實務應用的課程說明,歡迎您一起加入專業認證行列!
1. 課程目的:
因應教育部各項人才培育計畫與智慧製造的主軸,飆機器人提出【物聯網學程最佳方案】,由微處理器開始的基礎感知層,到自有雲的雲端資料庫與控制,並提供IoT Certified Engineer的證照學習指標,是非常完整且具系統性的IoT實務應用課程。
「IoT實務應用」、「IoT實務設計」與「IoT機電整合實務」為IoT Certified Engineer證照三大目標。其程式撰寫之部分為目前最容易上手的Arduino IDE編輯環境,且本證照由Arduino原廠授權,因此在證照使用上冠上Arduino IoT Certified Engineer以做區隔,藉由Arduino IoT機器人機電整合平台來完成以下兩實務階段(若非考證照則不限使用平台)。
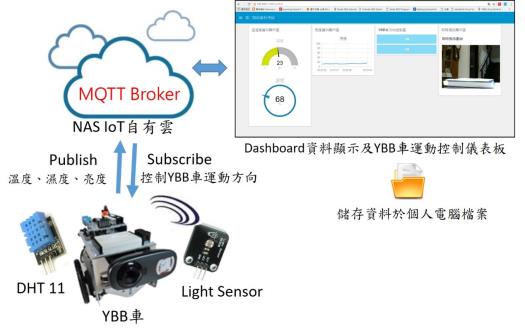
第一階段實務應用-是使用區域網路將物聯網裡感知層的感測與影像資料經由網路層傳輸到應用層裡的自有雲平台,並以圖表、回控、資料庫資料呈現等方式展現。
第二階段實務設計-是須透過Node-RED自行架構一個IoT網站與控制IoT機器人的實務設計能力。Arduino IoT Certified Engineer證照架構圖如下圖所示。

↑ 圖1 Arduino IoT Certified Engineer實務證照第一階段實務應用架構圖
↑ 圖2 Arduino IoT Certified Engineer實務證照第二階段實務應用架構圖
2. 實習設備:
無線IP分享器,YBB車(普特企業有限公司與USA Parallax合作),PlayRobot DHT11溫度感測器、Light Sensor光亮度感測器及NAS(Network Attached Storage)IOT自有雲平台,個人電腦,在電腦需安裝Node.js與Node-RED 0.14版以上的版本,Node-RED環境需加裝”node-red-dashboard”模組。Arduino IDE 1.6.1以上…等等。 (已通過超過四十台以上電腦壓力測試!)

↑ 圖3 Arduino IoT Certified Engineer實務證照應用實習設備
3. NAS IOT自有雲平台 :
NAS最少由兩顆硬碟構成,彼此相互儲存,可說是集合了各項網路應用優點。如較高與安全的資料儲存特性、方便快速的檔案共享平台、快速的遠端存取設定、資料儲存空間遠大於公有雲、省電24小時開機…等等。
普特企業結合此NAS優勢將IoT資料透過其下各式具WiFi裝置的教學平台(Gateway)送進NAS系統。系統符合MQTT/JSON協定與格式,藉由Node-RED作為連結引擎,不但簡單容易好上手,更重要結合多種通訊協定,學界到業界都可應用。
PlayRobot自有雲教學系統具以下優勢 :
- 既私宜公_結合公有雲與私有雲所有優勢。
- 自己資料,自己管。
- 多人版使用_適合上課,老師方便教、學生徹底學。
- 由基礎控制到雲端應用全方位IoT實務教學。
- 各式WiFi裝置都可作為雲端教學平台之Gateway。
- MQTT結合多種通訊協定,適用範圍廣。
- 結合區網與外網,優良課程網路品質,不用付費傳送資料更快。

↑ 圖4 PlayRobot NAS自有雲教學系統入口網站
4. YBB與TBB IoT教學平台 :
此系列是由普特企業有限公司與USA Parallax合作推出之IoT實務教學平台。由經典BB Car車系,提升至Arduino YUN 與 Tain控制系統。其Y與T即是Arduino YUN與Tain字母之縮寫。
目前兩款均可作為Arduino IoT實務認證的機器人平台,但若WiFi干擾較強的區域,建議使用TBB Car。因Arduino Tain可以同時支持2.4G/5GHz雙頻WiFi,是目前各家平台中較特別的。
以上相關物聯網實務認證教室設備與規格請洽飆機器人_普特企業有限公司。
電郵地址: sales@playrobot.com
5. 預期成果:
5-1 IoT Certified Engineer證照第一階段實務應用
第一階段預期成果為使用區域網路將YBB車影像、溫度、濕度、光亮度資料上傳於NAS IOT自有雲平台。
NAS IOT自有雲平台安裝有freeboard儀表板會顯示出溫度、濕度值與光度變化曲線,也將YBB車影像串流至NAS IOT自有雲平台之freeboard儀表板顯示即時影像。
freeboard也具有控制YBB車運動方式的控制鈕,可控制YBB車右轉或左轉。最後並將資料庫內容呈現出來。IoT Certified Engineer證照第一階段實務應用預期成果如下圖4與圖5所示。
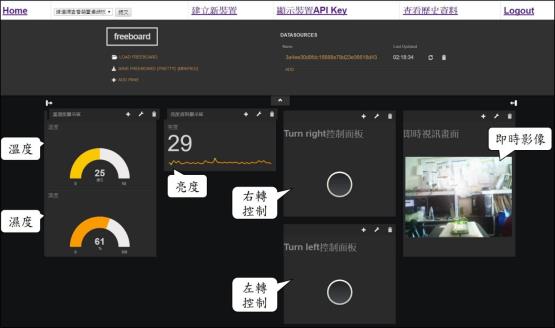
↑ 圖5 顯示YBB車訊息之freeboard監控儀表板
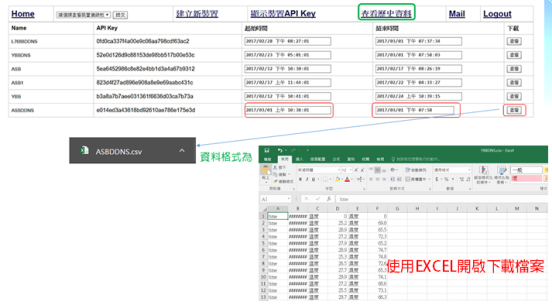
↑ 圖6 顯示YBB車訊息之MySQL資料檔案
5-2 IoT Certified Engineer證照第二階段實務應用
第二階段預期成果為使用區域網路將YBB車影像、溫度、濕度、光亮度資料發布至NAS IOT自有雲平台之MQTT Broker。
在個人電腦安裝Node.js與Node-RED(需加裝”node-red-dashboard”模組)。設計Node-RED流程使dashboard儀表板會顯示出溫度、濕度值與光度變化曲線,也在dashboard顯示出YBB車之攝影機拍攝的即時影像。
dashboard也具有控制YBB車運動方式的控制鈕,可控制YBB車右轉或左轉,並將感測器資料儲存於個人電腦檔案中。IoT Certified Engineer證照第二階段實務應用預期成果如圖5所示。

↑ 圖7 Node-RED流程與dashboard監控儀表板
6. 延伸應用:

恭喜您,歡迎一起加入Arduino IoT Certified Engineer 的專業認證行列。
===============================================
2017 全球首屆 Arduino IoT物聯網實務工程師 國際證照
教師認證與教師監評資格 培育訓練
===============================================
. 主辦單位:飆機器人_普特企業有限公司
. 協辦單位:國立台北科技大學、國立勤益科技大學、正修科技大學、德霖科技大學
Arduino原廠、QNAP Systems, Inc(威聯通)、Parallax, Inc、Edimax(訊舟科技)
. 參加對象:全國高中職及大專院校具正式教師資格之教師,每梯正取二十五名,備取五名。
. 研習資訊:
(北) 2017 / 7/11(二) 國立台北科技大學 車輛系
(北) 2017 / 7/14(五) 德霖科技大學 電資學院
(中) 2017 / 7/20(四) 國立勤益科技大學 資工系
(南) 2017 / 7/27(四) 正修科技大學 資工系
. 報名方式:請上飆機器人研習教師網站報名




























")
